

研發 · 產業 · 經費 · 2026
研發項目 · 產業合作
HK$60M+ 研究項目 · 9+ 華為合同 · 12 家長期產業、臨床、標準合作夥伴。最大單筆: HK$10M。
第一部分 · 經費
HK$60M+ 研究項目 (PI / Co-PI / Co-I)
作為 PI / PC 主持,並以 Co-PI / Co-I 參與 —— RGC、ITF、STF、香港體院、國自然/RGC JRS、華為、CRF、GRF、ITF-PRP、谷歌。
研究項目
HK$60M+
PI / Co-PI / Co-I
所參與項目的總價值(含 Co-PI / Co-I);以 PI / PC 主持的主要經費見下方
華為框架協議
HK$10M
最大單筆經費
3 年合作框架 · 2020–2023 續簽 · 9+ 子合同
RGC RIF R5009-21
HK$4.43M
項目協調人
面向智慧交通的可靠多智能體協同 GNSS · 2021–2026
智慧交通基金 (STF)
HK$6.19M
Rep. Co-PI / PC · 2026–2028
基於行動網路與 AI 的車輛自我診斷
香港體育學院 SRFS
HK$3.34M
PI · 2026–
精準起跑線監測系統,服務奧運級風帆運動員
國自然/RGC JRS
HK$1.17M
PI · 2026–2029
城市低空交通管理的穩健 GNSS
尋找開放資料集、軟體或配套程式碼? 請至開放資源頁。
第二部分 · 合作夥伴
12 家長期產業、臨床、標準合作夥伴
與智慧型手機廠商、汽車集團、體育研究所、醫療機構、航空管理部門的多年期框架合作與實地部署。
真實合作 · 實景記錄
長期落地的產業合作記錄


消費級 · 10 億+ 設備
智慧型手機與行動平台合作夥伴
 OPPO
OPPOPremium
OPPO 旗艦機型
AI 驅動的城市 GNSS 定位合作
 榮耀
榮耀穿戴
手錶定位
終端算力 / 功耗約束下的輕量化室內定位
 華為
華為9+
2018 起框架合同
面向智慧型手機與車載的多年期 GNSS 定位合作
 AIROHA
AIROHA3
輪邀請合作
晶片端智慧型手機 GNSS 路線圖;台灣
 聯發科
聯發科多年
技術諮詢
消費級 GNSS 硬體路線圖輸入;台灣
車載 · 航空 · 體育 · 臨床
垂直行業深度合作
 谷歌
谷歌20
個月駐地
谷歌山景城研究駐地
 美團
美團預研
無人機配送定位
低空城市走廊視覺輔助 RTK(探索性合作)
 騰訊
騰訊地圖
定位合作
地圖定位合作
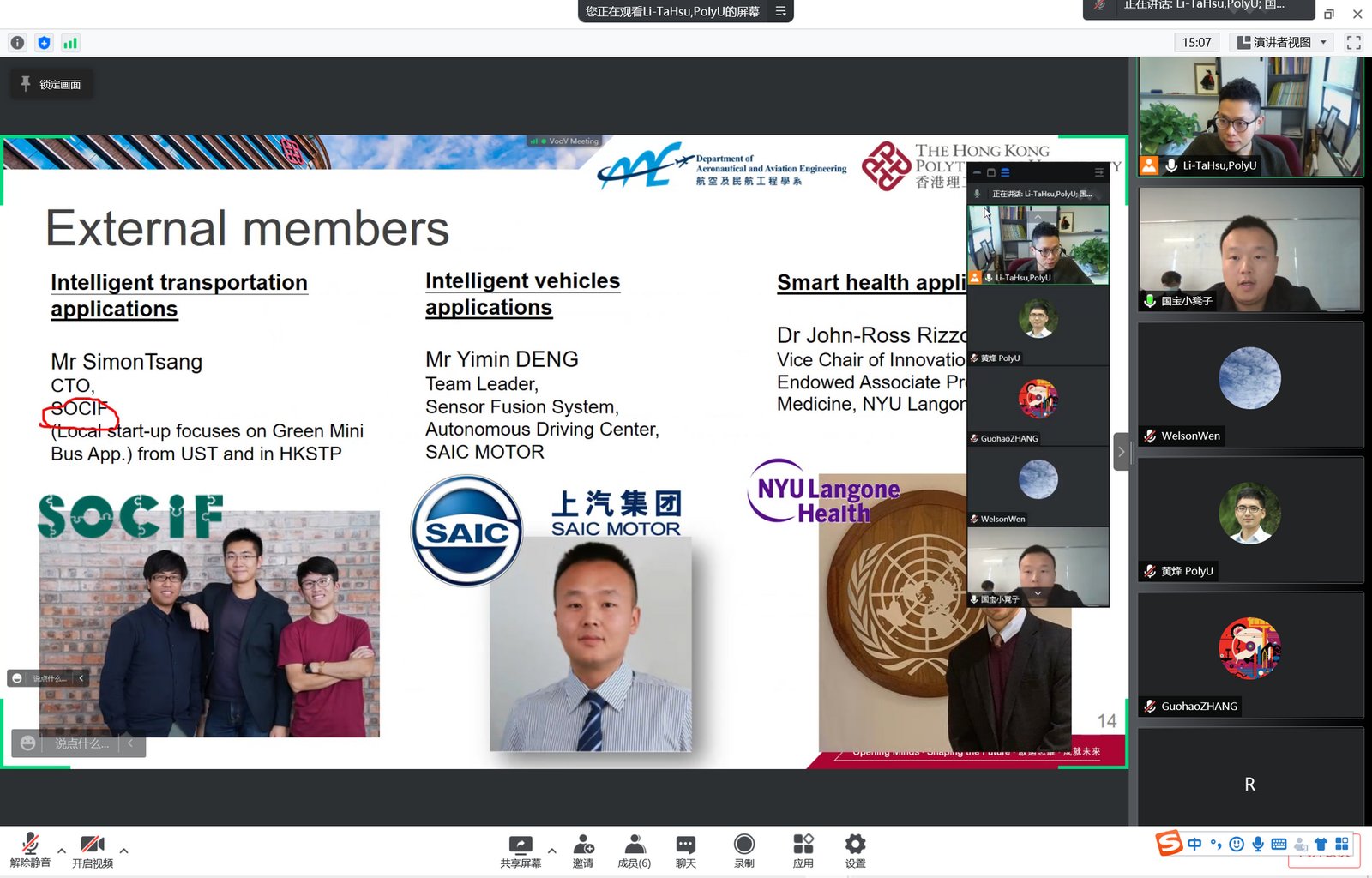
 上汽集團
上汽集團諮詢
自動駕駛完整性
自動駕駛車輛發布決策的完整性監測框架
 NYU Langone
NYU Langone2021 起
視障行人導航
密集曼哈頓城市環境的 3D 地圖輔助 GNSS
 香港體院
香港體院奧運
風帆訓練
海上浮標精準起跑線監測
示範
Stairio 部署點
實驗室自主樓梯安全巡檢機器人首個部署地
第三部分 · 研發項目
核心研究方向 + 具身產業轉化系統
長期資助的研究議程 (A) 與應用機器人 / 轉化系統 (B)。每張卡片可點開看具體項目頁面。
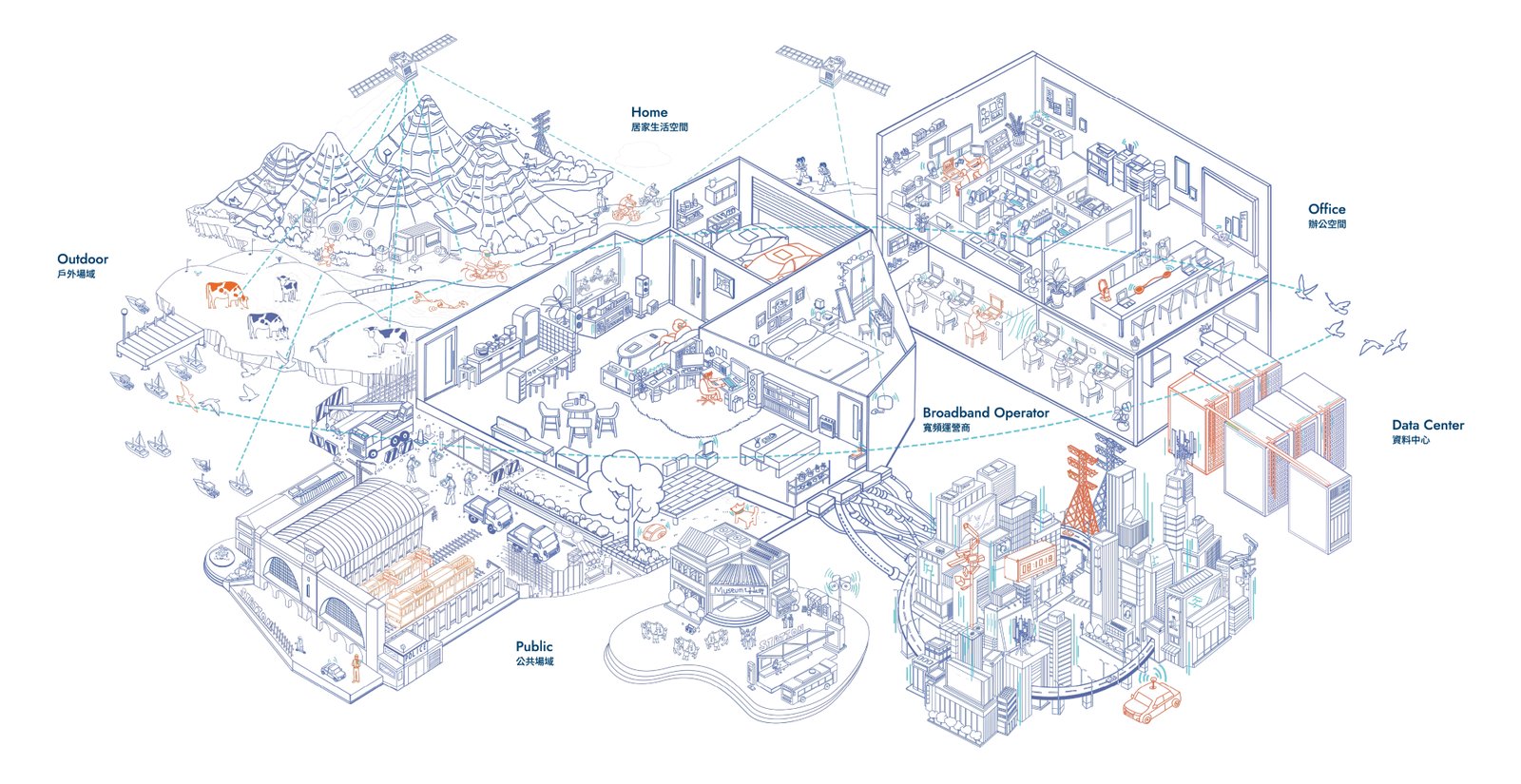
A. 核心研究項目
3D 地圖輔助 GNSS (3DMA) 用於智慧型手機與物聯網
進行中用 3D 城市模型、Skymask 匹配、輕量光線追蹤改善智慧型手機、穿戴裝置、低成本 IoT 接收機的 GNSS 定位 —— 實驗室招牌長線方向,錨定多年期華為合作。
B. 具身與產業轉化系統
第四部分 · 資助項目台帳
完整 PI / PC 經費記錄
為完整性記錄的緊湊台帳: 國自然及內地省級項目、國際諮詢、未在上方擁有獨立卡片的理大內部競爭性經費。
規模較小的 PI/PC 資助項目 —— 展開查看完整記錄
為完整性記錄的緊湊台帳: 國自然及內地省級項目、國際諮詢、未在上方擁有獨立卡片的理大內部競爭性經費。旗艦項目見 A、B 兩節。
外部 · 已完成
| 年份 | 資助方 | 項目 | 金額 | 週期 |
|---|---|---|---|---|
| 2021 | NYU Langone Medical Center · Consultancy | 3DMA GNSS for Vision-Impaired Pedestrians (real-time) | US$10,000 | 2021– |
| 2020 | DAAD / RGC Germany–HK Joint Research Scheme | Collaborative Navigation for Smart Cities | HK$57,200 | 2021–2022 |
| 2019 | SAIC Motor Corporation · Consultancy | Integrity for Autonomous Driving | (industry consultancy) | 2019– |
| 2018 | Shenzhen 市基金 (JCYJ20170818103653507) | Low-cost GNSS module for UAV urban positioning strategy | RMB 300,000 | 2018–2020 |
內部(理大) · 進行中
| 年份 | 資助方 | 項目 | 金額 | 週期 |
|---|---|---|---|---|
| 2025 | PolyU · Financial Support for Book Writing Scheme (97HR) | Principles of Indoor Positioning and Indoor Navigation | HK$1,200,000 | 2025–2028 |
| 2024 | PolyU · Research Centre for Metaverse | Robotics, AI, navigation, metaverse interaction | HK$300,000 | 2024– |
內部(理大) · 已完成
| 年份 | 資助方 | 項目 | 金額 | 週期 |
|---|---|---|---|---|
| 2022 | PolyU · FENG Intra-Faculty Interdisciplinary Project | Perception-based GNSS PPP-RTK / LVINS for UAS in Urban Canyons | HK$400,000 | 2022–2024 |
| 2020 | PolyU · RISUD EFA (Project Coordinator) | Resilient Urban PNT for UAV Remote Sensing in Urban Regions | HK$1,000,000 | 2020–2023 |
| 2019 | PolyU · FENG Intra-Faculty Interdisciplinary Project | Security Enhancement of Positioning Sensors on Connected AVs | HK$400,000 | 2019–2020 |
| 2017 | PolyU · Startup Fund (AAE) | Positioning and Navigation for AV by Sensor Integration | HK$550,000 | 2017–2020 |
| 2017 | PolyU · Internal Grant for GRF/ECS-rated-3.5 (CRG) | GPS Error Modelling using 3D Point Cloud | HK$105,000 | 2017–2019 |
| 2016 | PolyU · Large Equipment Fund (Teaching) | Equipment for Teaching Flight Mechanics, GNC | HK$1,132,815 | 2016–2017 |