

30 March 2020
event
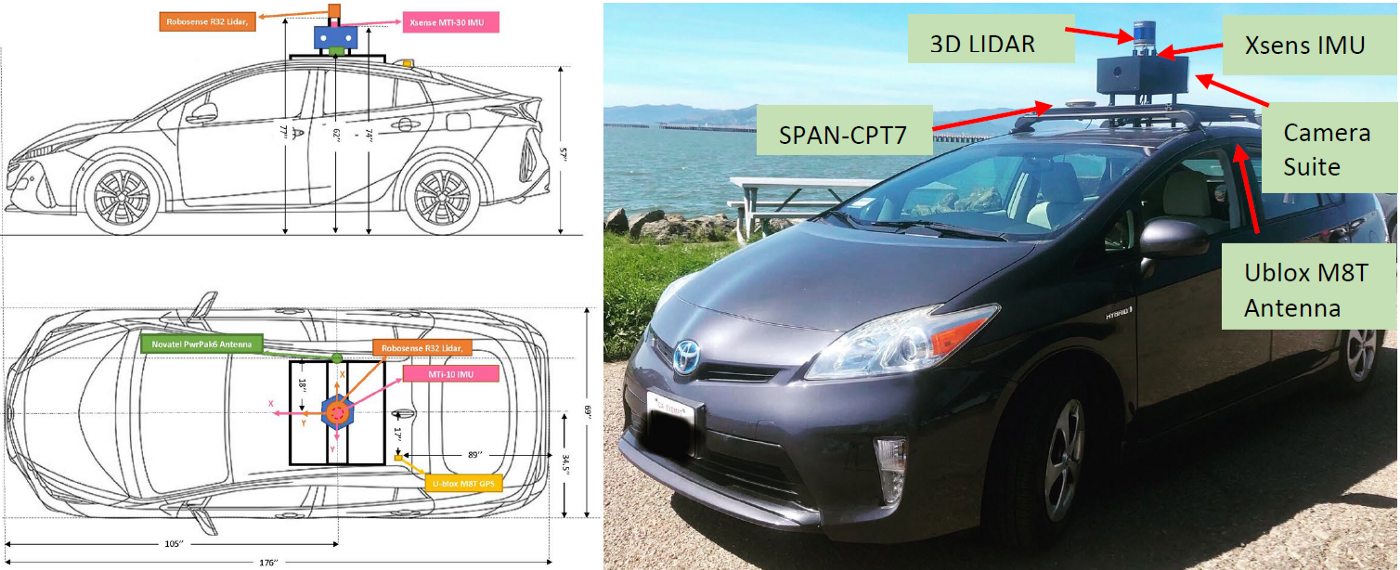
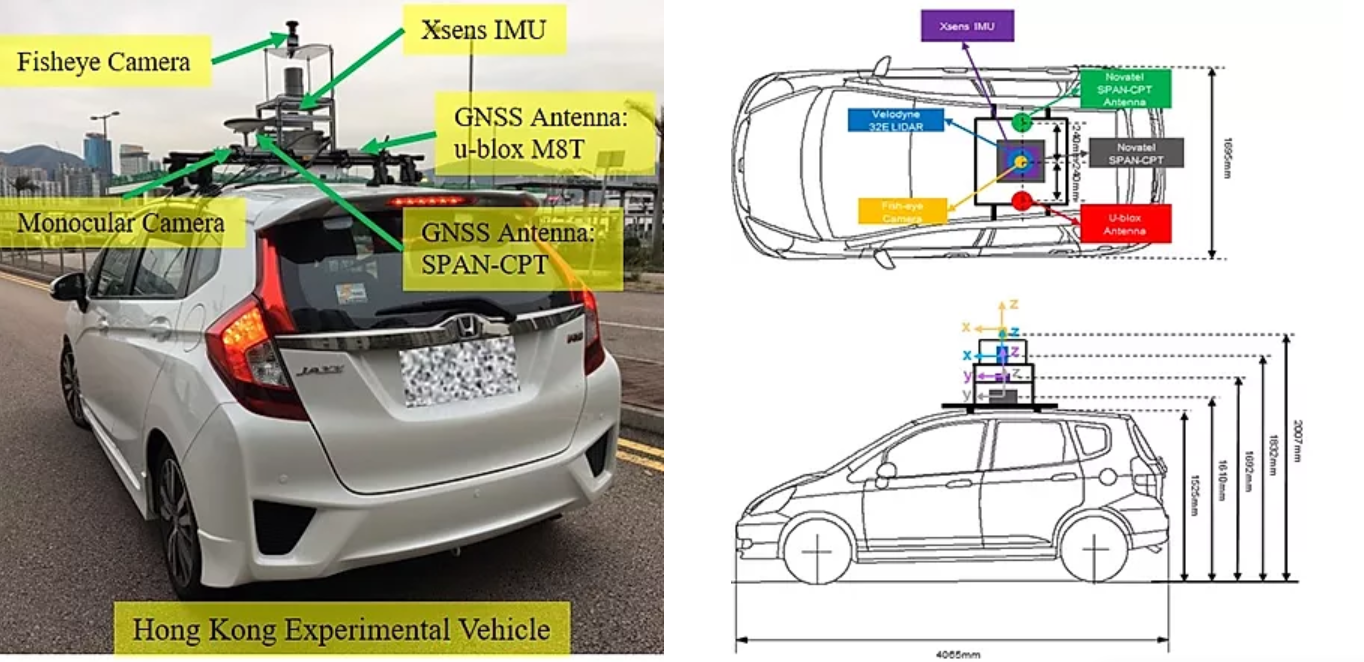
IPNL 與加州大學柏克萊分校機械系統控制實驗室(Mechanical Systems Control Lab)合作,發布了 UrbanLoco 資料集——一套完整感測器套組的基準資料集,專為高度都市化環境中的製圖與定位研究而設計。該資料集包含於舊金山與香港收集的 13 條軌跡,涵蓋超過 40 公里的多樣都市地形,包括都市峽谷、橋樑、隧道與急轉彎。
UrbanLoco 資料集提供來自光達(LiDAR)、相機(包括舊金山的 360 度環景與香港的魚眼天空相機)、IMU 與 GNSS 接收機的資料。真值(ground truth)由配備 RTK 修正的 NovAtel SPAN CPT 7 系統提供。該資料集直接填補了一項關鍵缺口:現有的公開資料集要嘛感測器涵蓋範圍有限,要嘛迴避最具挑戰性的都市情境,而 UrbanLoco 則捕捉了真實世界的狀況——GNSS 訊號因高樓的多路徑反射而嚴重劣化,且光達與相機方法在面對動態物體時難以應付。
隨附的論文由 Weisong Wen、Yiyang Zhou、Guohao Zhang、Saman Fahandezh-Saadi、Xiwei Bai、Wei Zhan、Masayoshi Tomizuka 與 Li-Ta Hsu 共同撰寫,並於法國巴黎舉行的 ICRA 2020 發表。該資料集以 Creative Commons Attribution-NonCommercial-ShareAlike 4.0 授權,公開託管於 GitHub,此後已被研究社群廣泛採用,作為光達 SLAM、視覺慣性導航與多感測器融合演算法的基準測試。