

研究方向
可信赖 PNT —— 从 信号 到 状态
从原始 GNSS 信号处理到完好性感知的自主导航。覆盖具身智能 PNT 完整链路的六大研究方向。
IPNL 构建可信赖的定位、导航与计时系统,覆盖从接收机端 GNSS 信号处理到完好性感知的自主系统全链路。我们研究完整 PNT 链 —— 接收机信号处理、城市环境下信号退化、3D 环境感知、因子图优化、多传感器融合、完好性监测 —— 让机器人、车辆、无人机、智能手机和安全关键系统不仅知道自己在哪,还能知道这个位置是否可信。
我们终身的技术使命是 面向具身智能的鲁棒、低成本传感器融合 —— 无人机、地面车辆、下一代移动机器人 —— 用一组本地传感器在开阔天空、城市峡谷、室内、GNSS 拒止环境中无缝运行。
IPNL PNT 技术栈
我们覆盖完整的从信号到应用的链条 —— 从原始 GNSS 信号处理到完好性感知的自主系统:
信号

重要荣誉
- 2023 ION Per Enge 早期成就奖 —— 当年全球唯一获奖人,亚洲高校第二人
- 2024 NAVIGATION 期刊最高引用论文 —— 因子图优化用于 GNSS/INS 集成:与扩展卡尔曼滤波器的比较
- IPIN 2024 大会主席(300+ 参会者)
- ION/IAG 亚洲城市峡谷定位导航工作组创始主席(2019 起)
- NAVIGATION 期刊副主编(2022 起);IEEE TAES 副主编(2024 起)
研究方向
接收机层 GNSS 信号处理与 SDR
软件无线电接收机、矢量跟踪、信号质量分析,把退化的卫星信号转化为带明确不确定度的可用测量。
GNSS SDR矢量跟踪捕获 / 跟踪L1 / L5直接位置估计C/N0相关器特征接收机层不确定度
城市 GNSS 可靠性与信号误差建模
建模 GNSS 测量在密集城市环境中如何失效 —— NLOS、多径、衍射、重尾误差 —— 让下游估计与完好性系统知道何时可信。
城市 GNSS多径NLOS衍射多普勒一致性重尾误差测量可靠性不确定度建模
环境感知与 3D 地图辅助 PNT
用 3D 城市模型、LiDAR 地图、天空可视性、光线追踪、数字孪生,把城市环境从障碍转化为导航的先验信息。
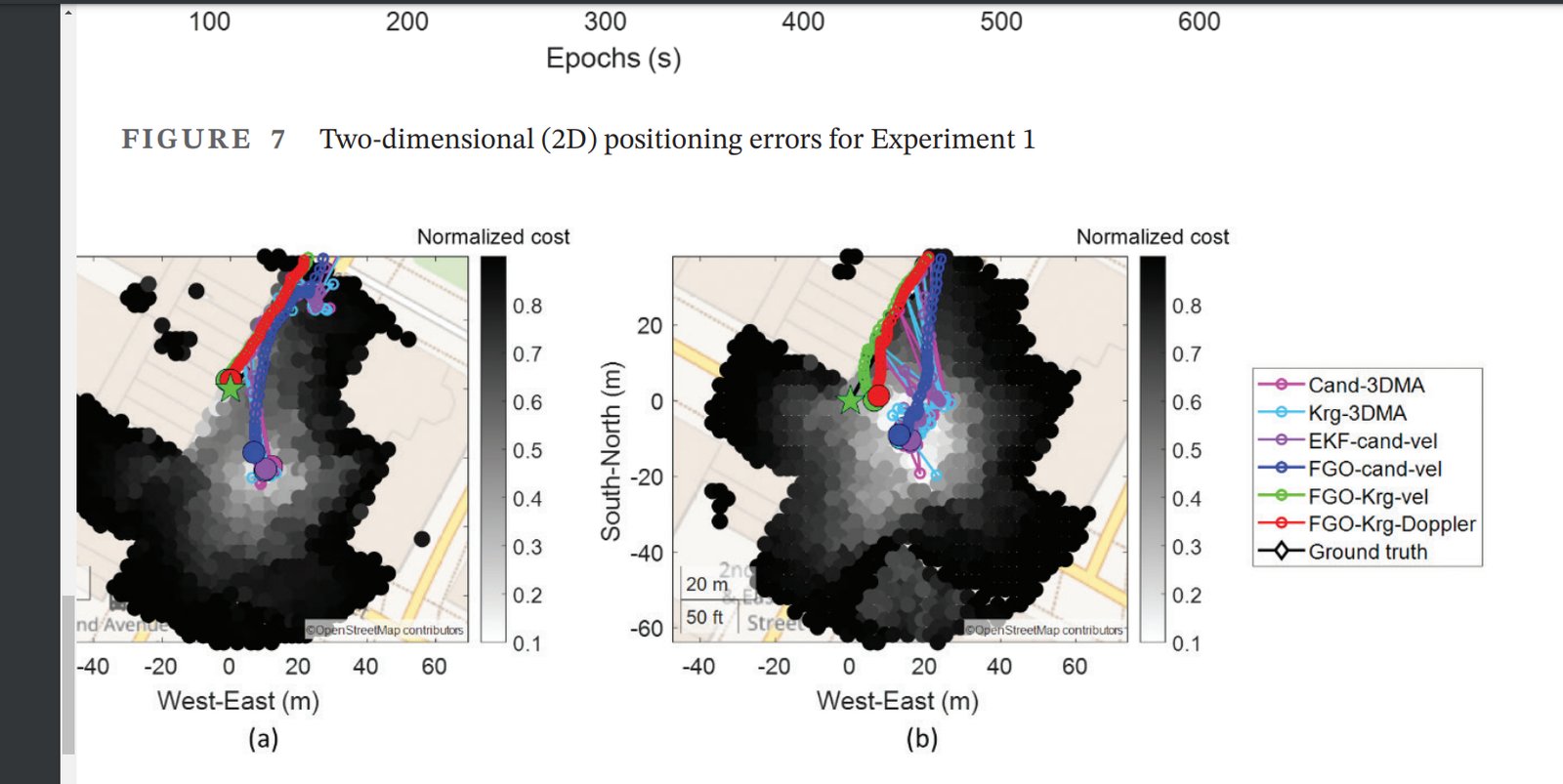
3D 地图辅助 GNSS3DMA GNSS3D 城市模型LiDAR 地图光线追踪数字孪生天空可视性Skymask 匹配环境感知定位
基于优化的估计与因子图
因子图优化作为 GNSS / INS / 载波相位 / 多普勒 / 地图 / 感知 / 完好性的统一框架,跨异质测量在时间维度上推理。
因子图优化FGOGNSS/INSRTKPPP-RTK平滑非线性优化稳健估计传感器融合
完好性、故障检测与安全可信定位
既估计状态、也估计可信度 —— 故障检测、非高斯过界、保护级计算、完好性约束优化,服务于安全关键自主系统。
导航完好性故障检测保护级过界非高斯误差完好性约束 FGO安全关键定位欺骗检测
面向具身系统的无缝多传感器 PNT
GNSS/INS/LiDAR/相机/UWB/Wi-Fi 紧耦合融合,服务于车辆、机器人、无人机、智能手机、可穿戴设备在开阔天空 / 城市峡谷 / 室内 / GNSS 拒止环境下的无缝运行。
多传感器融合GNSS/INSLiDAR 惯性里程计视觉惯性里程计UWBWi-Fi RTT智能手机可穿戴机器人 / 车辆 / 无人机室内外无缝定位