
News
IPNL co-organizing 1st ICRA 2026 Workshop on Robot Meets GNSS and Ranging
Prof. Li-Ta Hsu is co-organizing the 1st Workshop on Robot Meets GNSS and Ranging for Seamless Autonomy at IEEE ICRA 2026 in Vienna on 5 June 2026, exploring synergies and challenges of radio-based ranging technologies in robotics.

Invited talk at CAS Wuhan PNT forum: 'Estimation in GNSS/INS integrated navigation: from EKF, FGO to SDP'
Prof. Li-Ta Hsu gave the opening technical talk at the 'Intelligent Fusion Positioning and Resilient PNT' Academic Forum at the CAS Innovation Academy of Precision Measurement Science and Technology in Wuhan on 24 April 2026. PolyU's IPNL fielded four speakers across the day: Prof. Hsu, Penggao Yan, Shiyu Bai, and Penghui Xu.

IPNL at ION Pacific PNT 2026 (Honolulu, April 2026)
PolyU IPNL took part in the 2026 ION Pacific PNT meeting in Honolulu, Hawaii. Prof. Li-Ta Hsu served as a session chair and speaker, and IPNL members presented their work, continuing the lab's multi-year engagement with the Institute of Navigation's Pacific PNT conference series.
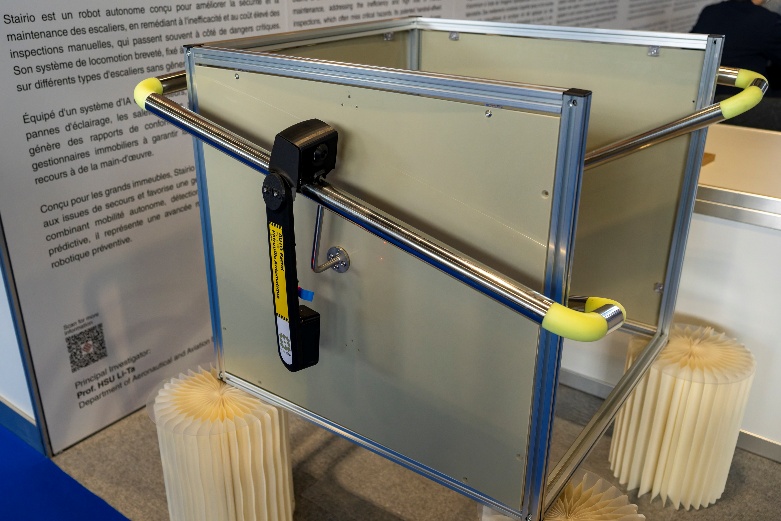
Stairio receives Gold Medal with Congratulations of the Jury at 51st Geneva Inventions Exhibition
Stairio — an autonomous staircase safety monitoring robot led by Prof. Li-Ta Hsu — received the Gold Medal with Congratulations of the Jury at the 51st International Exhibition of Inventions Geneva.
IEEE ITSC 2025 workshop talk: 'When IV Meets Urban — IE Research' (November 2025)
Prof. Li-Ta Hsu gave an invited workshop talk at IEEE ITSC 2025 — When Intelligent Vehicles Meets Urban: Integrity-Estimation Research — building on the lab's integrity-constrained factor graph optimization research line.
Honor–PolyU joint workshop (September 2025)
PolyU IPNL hosted a joint research workshop with Honor (one of the major Chinese smartphone manufacturers) at PolyU on 29 September 2025, presenting the lab's GNSS, navigation, and AI research portfolio.

ION GNSS+ 2025 Salt Lake City + California (Google visit, Robotics Panel) — September 2025
Prof. Li-Ta Hsu attended ION GNSS+ 2025 in Salt Lake City, contributed to a Satellite Navigation for Robotics panel discussion, then continued to California for a follow-up Google Research project meeting and a Physical AI / Robotics meetup.

PolyU IPNL in Singapore: NTU seminar + ICASSE 2025 (July 2025)
Over 29–30 July 2025 in Singapore, Prof. Li-Ta Hsu gave an invited NTU seminar on super-resolution GPS receivers and joined the editors' dialogue at ICASSE 2025, where PhD student Penghui Xu also presented on AI-driven satellite navigation.

Invited industry talk at Airoha Technology Taiwan: Indoor Positioning and Long-Coherent GNSS (July 2025)
Prof. Li-Ta Hsu gave an invited industry talk at Airoha Technology Corporation in Taiwan on indoor positioning and long-coherent-integration GNSS receiver design — continuing the lab's multi-year engagement with Airoha that includes 2022 and 2021 invited talks.
Invited talk at HK Motor Transport and Driving Industry Workers General Union (July 2025)
Prof. Li-Ta Hsu was invited to speak at the Hong Kong Motor Transport and Driving Industry Workers General Union forum 'The Intelligent Driving Wave: Transforming Transportation' — bridging academic positioning research with the HK transport workforce. Forum covered by Wen Wei Po.

Invited talk at Shanghai Jiao Tong University: 3DMA Development and Future (June 2025)
Prof. Li-Ta Hsu gave a workshop talk at Shanghai Jiao Tong University on 28 June 2025 — 3DMA Development and Future — on the past, present and trajectory of 3D-Map-Aided (3DMA) GNSS positioning in urban environments.
ICLT 2025 paper presented: GitHub as a Supplementary Educational Tool (May 2025)
Prof. Li-Ta Hsu presented a paper at the International Conference on Learning and Teaching (ICLT) 2025 in Hong Kong — GitHub as a Supplementary Educational Tool — building on the lab's multi-year GitHub-pedagogy line of teaching innovation research.
Invited talk at TUM Munich: Enabling Robotics Applications with Satellite Navigation (May 2025)
Prof. Li-Ta Hsu gave a 30-minute invited public research seminar at the Technical University of Munich — Enabling Robotics Applications with Satellite Navigation: Bridging the Gap with Mathematical Optimization Frameworks.

IPNL at IEEE/ION PLANS 2025 Salt Lake City + Stanford visit (April 2025)
PolyU IPNL presented three conference papers at the 2025 IEEE/ION Position, Location and Navigation Symposium (PLANS) in Salt Lake City, with a Stanford visit en route.

European tour March 2025: Munich Satellite Navigation Summit Session 4 Chair, Hannover invited talk, London visit
Prof. Li-Ta Hsu chaired Session 4 'Innovations Driven by Multi-Layer PNT' at the Munich Satellite Navigation Summit 2025 on Thursday 27 March, with an 8-person panel spanning BMW, Airbus, Septentrio, uBlox, Bundeswehr Munich, Fraunhofer IIS, and Google Germany. The week-long trip also included a 90-minute invited talk at i.c.sens Leibniz University Hannover and a London visit.