

IEEE Robotics and Automation Letters (2026)
journal
Q1
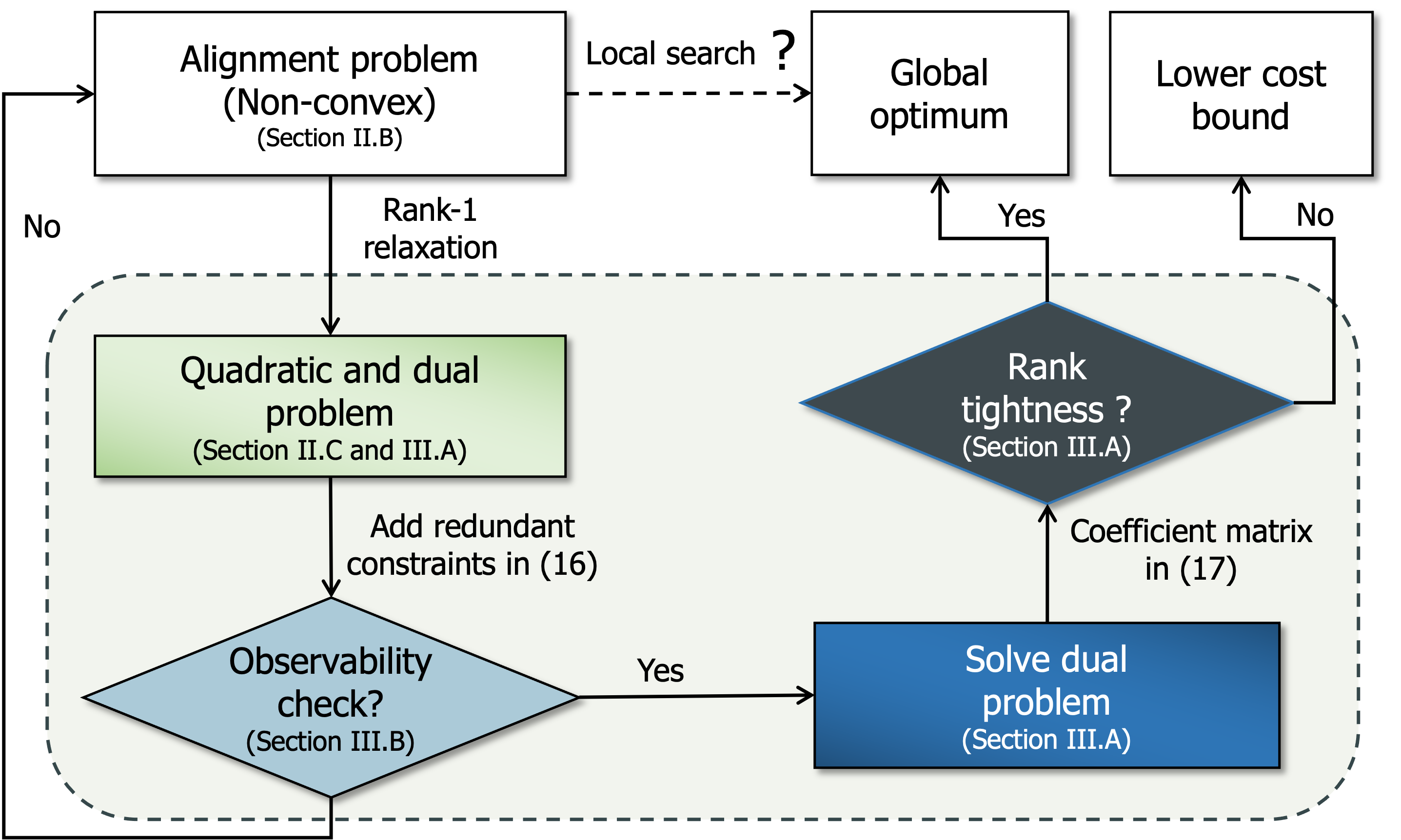
Key idea. Aligning the global GNSS frame with a local odometry/SLAM frame is a non-convex problem that local solvers can get silently wrong. The method applies a rank-1 relaxation and Lagrangian duality, checks observability (asking for more measurements when the problem is under-determined), and uses the rank tightness of the dual solution to certify when the recovered alignment is the global optimum.
Why it matters. Frame alignment underpins any fusion of GNSS with locally consistent navigation. A certificate of global optimality replaces “hope the solver converged” with a checkable guarantee. (IEEE Robotics and Automation Letters, 2026, Q1.)