

IEEE Transactions on Vehicular Technology (2019)
journal
Q1
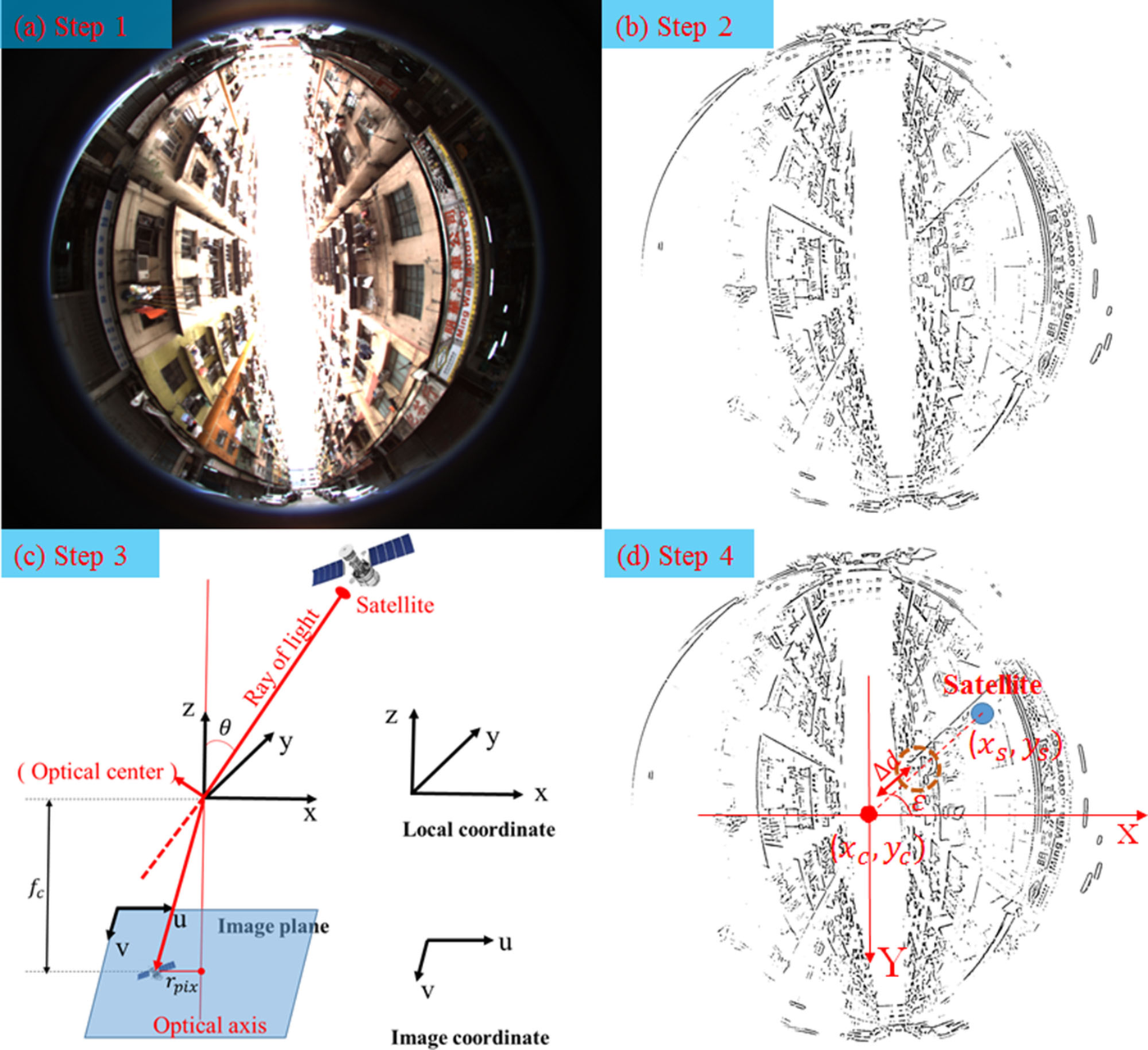
Key idea. A sky-pointing fish-eye camera segments the sky from the surrounding buildings; projecting the satellites onto the segmented image immediately reveals which ones are NLOS (figure). The classified measurements then feed a tightly coupled GNSS/INS factor graph.
Why it matters. The camera gives the receiver eyes — NLOS satellites are identified by direct observation rather than statistical guesswork, improving tightly coupled integration exactly where it struggles: the urban canyon. (IEEE Transactions on Vehicular Technology, 2019, Q1.)