

IEEE Sensors Journal (2017)
journal
Q1
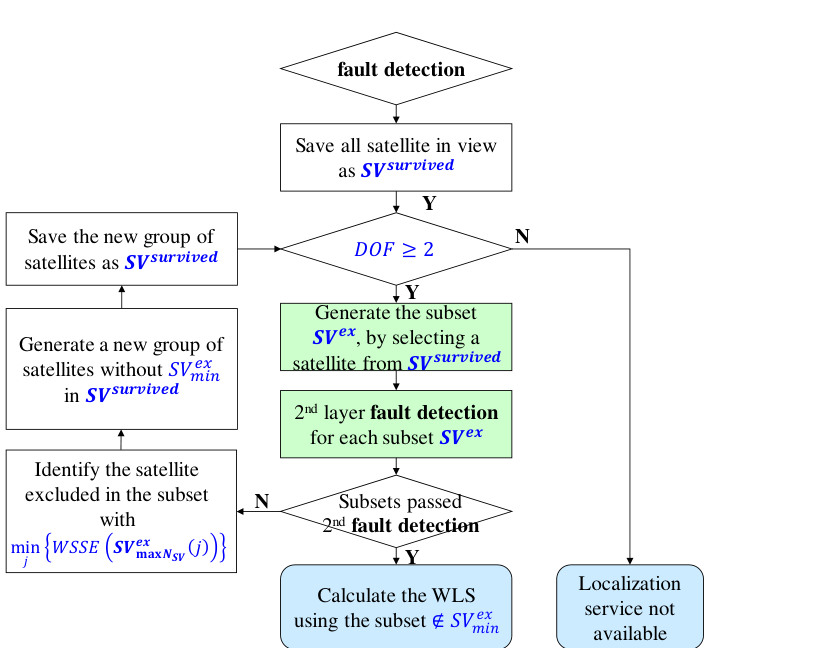
Key idea. Urban canyons routinely corrupt several satellites at once. A greedy consistency check searches subsets of the satellites in view — excluding the worst offender each round — until the remaining set passes fault detection and is used for positioning (figure).
Why it matters. Classical RAIM assumes a single fault; dense cities break that assumption daily. This deletion-based exclusion restored usable urban positioning under simultaneous faults — and its known limitation (aggressive exclusion degrading geometry) is what the lab’s later incremental fault-isolation work improves on. (IEEE Sensors Journal, 2017, Q1.)