

R&D programs · industry partnerships
HK$60M+ in research projects · 9+ Huawei contracts · 12 long-running industry, clinical, and standards partners. Largest single grant: HK$10M.
HK$60M+ in research projects (PI, Co-PI & Co-I)
Led as PI / PC and joined as Co-PI / Co-I — RGC, ITF, STF, HKSI, NSFC/RGC JRS, Huawei, CRF, GRFs, ITF-PRP, Google — through 2026.
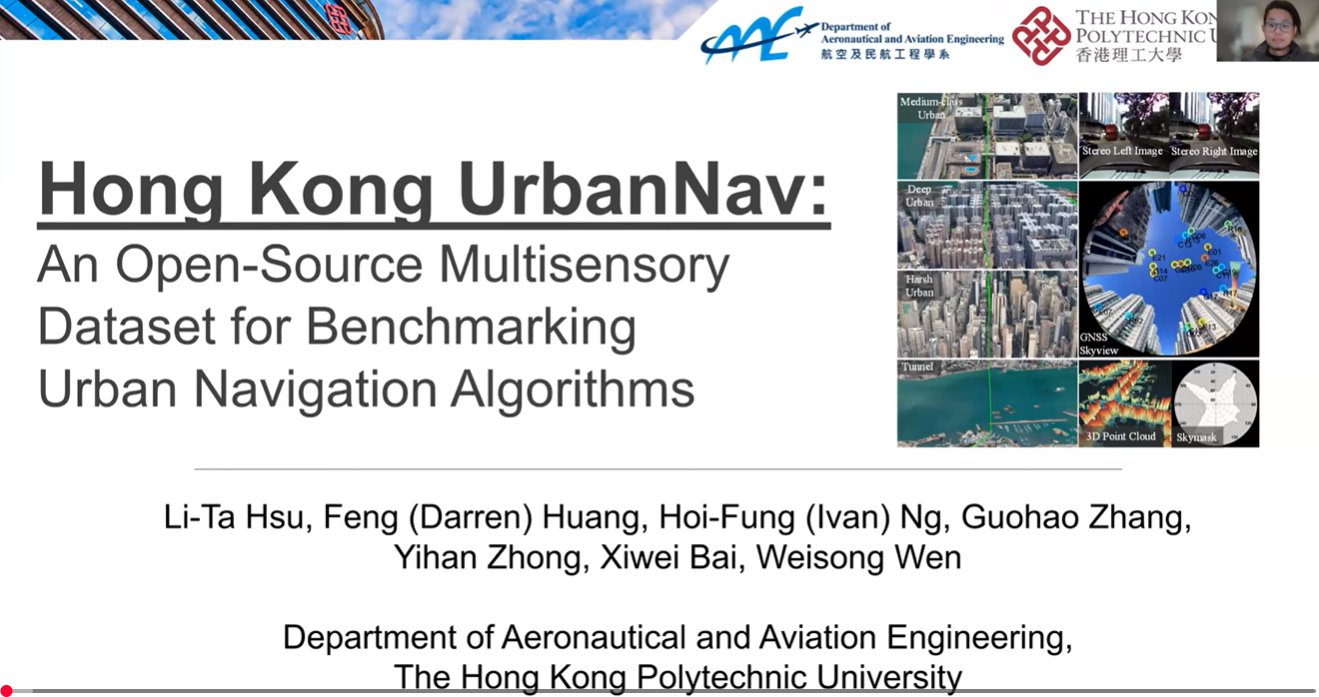
Looking for open datasets, software, or companion code? See the Resources page — UrbanNav, UrbanLoco, GraphGNSSLib, GPS_VT_SDR, and IPIN book examples are all catalogued there.




12 long-running industry, clinical & standards partners
Multi-year framework agreements and on-the-ground deployments with smartphone makers, automotive integrators, sports institutes, hospitals, and aviation authorities.
A long-running, on-the-ground collaboration record


Smartphone & mobile platform partners
 OPPO
OPPO HONOR
HONOR HUAWEI
HUAWEI AIROHA
AIROHA MediaTek
MediaTekVertical-specific deep collaborations
 Google
Google Meituan
Meituan Tencent
Tencent SAIC Motor
SAIC Motor NYU Langone
NYU Langone HKSI
HKSICore research agendas and embodied translational systems
Long-running funded research agendas (A) plus applied robotics and translational systems (B). Click any card for the project page.
A. Core Research Programs
Multi-Agent Collaborative GNSS for Intelligent Transportation Systems
completedVehicles share GNSS measurements through inter-vehicle ranging to improve urban positioning accuracy and integrity for ITS — the anchor RGC RIF program of the lab.
Robust GNSS Navigation for Urban Air Traffic Management
activeAviation-grade GNSS + multi-sensor fusion navigation for low-altitude UAVs operating in dense urban environments — the urban air mobility (UAM / UTM) frontier.
Universal Vehicle Self-Diagnosis: Predictive Component Monitoring
activeData-driven, real-time predictive vehicle self-diagnosis using automotive-component data streams — extending the integrity arc from positioning into vehicle health monitoring.
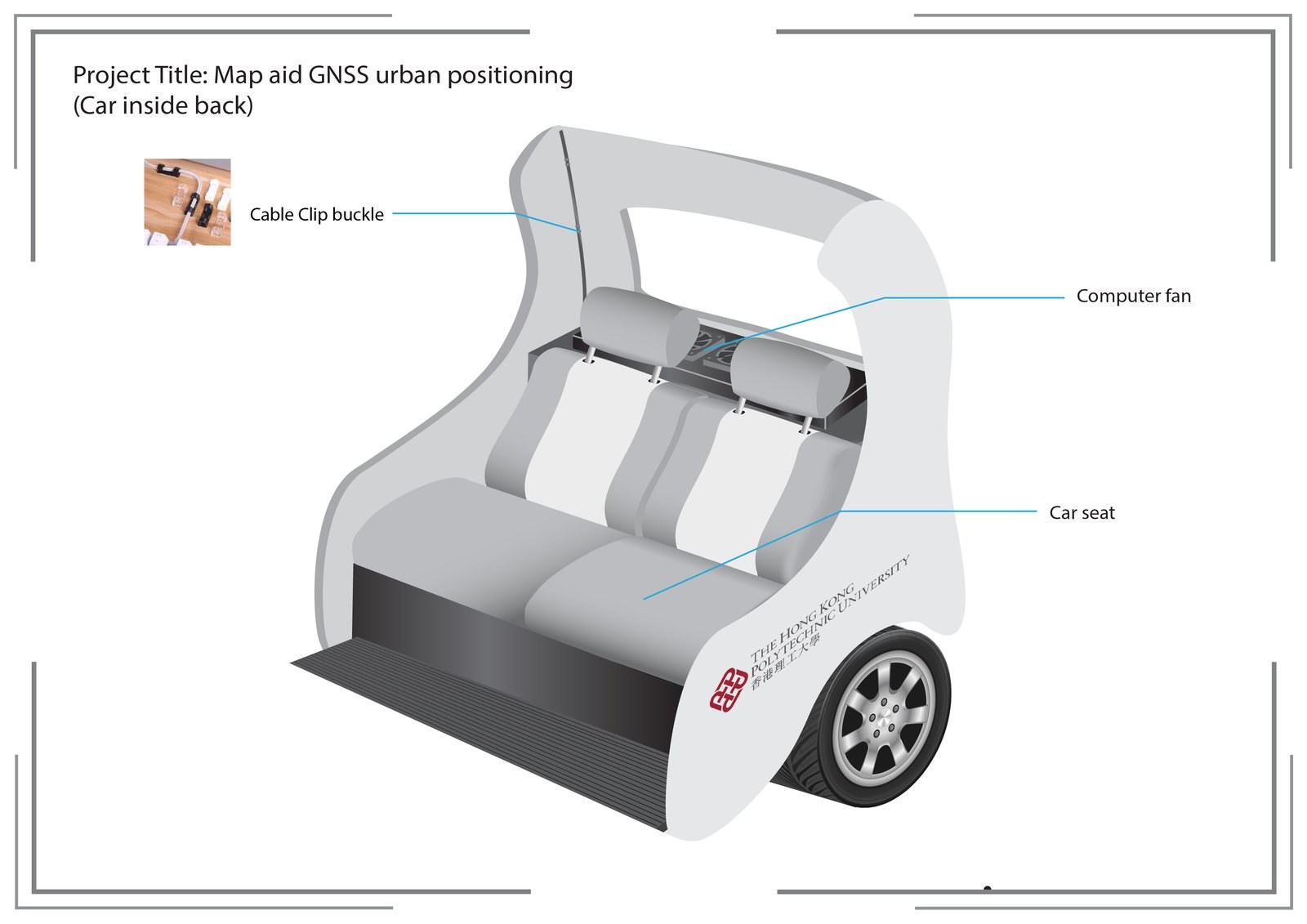
3D Map-Aided GNSS (3DMA) for Smartphone and IoT
activeUsing 3D city models, skymask matching, and lightweight ray tracing to improve GNSS positioning on smartphones, wearables, and low-cost IoT receivers — the lab's signature long-running research thread, anchored by the multi-year Huawei collaborative partnership.
Environment-Aware GNSS for UAS and Autonomous Driving
activeUsing LiDAR, multi-camera perception, fish-eye sky imaging, and other rich onboard sensors to inform GNSS reliability and positioning on autonomous vehicles, UAVs, and robotic platforms — where the sensor budget and integrity bar are both higher than smartphone-grade positioning.
B. Embodied and Translational Systems
Stairio: Autonomous Staircase Safety Monitoring Robot
activeHandrail-affixed locomotion system with onboard AI vision for autonomous staircase inspection and predictive maintenance.
LunaNav: Lunar Robotic Exploration
activeExtending the lab's multi-sensor positioning expertise from Earth's urban canyons into lunar surface navigation.
Precision Start-Gate Monitoring for Olympic-Class Windsurfing
activeMarine buoy-deployed precision start-gate monitoring system for athletes during Olympic-class windsurf training — extending the lab's multi-sensor positioning expertise into sports-tech.
The complete PI / PC funding record
A compact record for completeness: the long-tail of NSFC and Mainland-China provincial schemes, international consultancies, and PolyU internal competitive grants not above.
Smaller PI/PC funded programs — expand for the full record
A compact record for completeness: the long-tail of NSFC and Mainland-China provincial schemes, international consultancies, and PolyU internal competitive grants that don't have dedicated project cards above. Flagship programs are in Sections A–B.
External · Completed
| Year | Funder | Project | Amount | Period |
|---|---|---|---|---|
| 2021 | NYU Langone Medical Center · Consultancy | 3DMA GNSS for Vision-Impaired Pedestrians (real-time) | US$10,000 | 2021– |
| 2020 | DAAD / RGC Germany–HK Joint Research Scheme | Collaborative Navigation for Smart Cities | HK$57,200 | 2021–2022 |
| 2019 | SAIC Motor Corporation · Consultancy | Integrity for Autonomous Driving | (industry consultancy) | 2019– |
| 2018 | Shenzhen 市基金 (JCYJ20170818103653507) | Low-cost GNSS module for UAV urban positioning strategy | RMB 300,000 | 2018–2020 |
Internal (PolyU) · Active
| Year | Funder | Project | Amount | Period |
|---|---|---|---|---|
| 2025 | PolyU · Financial Support for Book Writing Scheme (97HR) | Principles of Indoor Positioning and Indoor Navigation | HK$1,200,000 | 2025–2028 |
| 2024 | PolyU · Research Centre for Metaverse | Robotics, AI, navigation, metaverse interaction | HK$300,000 | 2024– |
Internal (PolyU) · Completed
| Year | Funder | Project | Amount | Period |
|---|---|---|---|---|
| 2022 | PolyU · FENG Intra-Faculty Interdisciplinary Project | Perception-based GNSS PPP-RTK / LVINS for UAS in Urban Canyons | HK$400,000 | 2022–2024 |
| 2020 | PolyU · RISUD EFA (Project Coordinator) | Resilient Urban PNT for UAV Remote Sensing in Urban Regions | HK$1,000,000 | 2020–2023 |
| 2019 | PolyU · FENG Intra-Faculty Interdisciplinary Project | Security Enhancement of Positioning Sensors on Connected AVs | HK$400,000 | 2019–2020 |
| 2017 | PolyU · Startup Fund (AAE) | Positioning and Navigation for AV by Sensor Integration | HK$550,000 | 2017–2020 |
| 2017 | PolyU · Internal Grant for GRF/ECS-rated-3.5 (CRG) | GPS Error Modelling using 3D Point Cloud | HK$105,000 | 2017–2019 |
| 2016 | PolyU · Large Equipment Fund (Teaching) | Equipment for Teaching Flight Mechanics, GNC | HK$1,132,815 | 2016–2017 |